
今年全国两会期间,“具身智能”正式进入国家战略规划,一个关于智能体与物理世界深度交互的全新纪元已然开启。在这场席卷全球的技术革命中,汇博机器人集团以深厚的技术积淀,正重塑具身智能教育的未来图景。
作为机器人生态构建的领航者,汇博机器人集团始终聚焦“人工智能+机器人”技术的实际落地,深耕智能制造应用、人才培养与供给的全链条赋能体系。
2025世界机器人大会上,汇博机器人集团推出具身智能机器人开发平台(Astra Pro),以硬核科技突破传统教学边界,将“感知-认知-决策-行动”一体化智能系统,转化为触手可及的教学场景与科研载体,引发广泛关注。
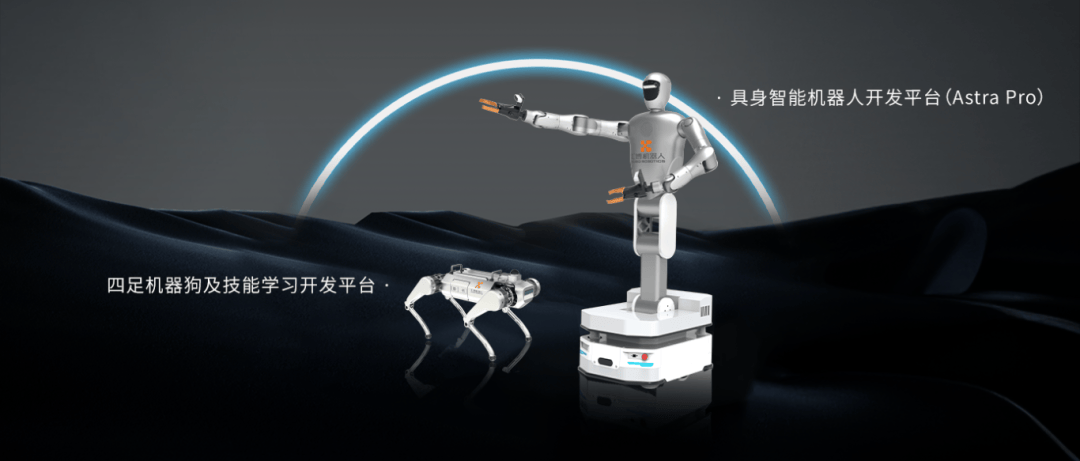
目前,汇博机器人集团已面向院校发布具身智能机器人开发平台(Astra Pro)、四足机器狗及技能学习开发平台等具身智能系列产品,加速具身智能领域的人才培养与科技成果转化。
一、汇博具身智能系列产品
1、具身智能机器人开发平台(Astra Pro)
具身智能机器人开发平台(Astra Pro)是一款面向高等教育与科研场景的智能化实验设备,深度融合多模态感知与AI技术,支持多学科交叉实验。

稳定可靠的教学载体:破解双足局限,适配课堂高频场景
轮足式设计保障系统运行稳定可靠,支持教室、实验室等复杂场景长时间稳定运行(续航覆盖完整课时),确保教学演示、学生实操更高效。这种稳定性让具身智能教学从“偶尔展示”变为“常态化实训”,成为老师可信赖的课堂核心工具。
拟人化交互平台:让机器人 “像人一样工作”
七自由度拟人双臂:可完成抓取、递物、协作装配等精细动作,模拟人类上肢运动逻辑,为服务机器人设计、人机协作等课程提供可触摸、可操作的实操载体;
多模态交互能力:接入DeepSeek、千问等大语言模型实现“知识问答+任务指令”,适配VLA视觉模型让机器人“看懂”人类动作(如识别“递东西”手势)、识别物品属性(如区分水杯与工具),将抽象的AI交互转化为具象教学场景。
全流程AI训练闭环:从“黑箱训练”到“透明化科研”
选配VR遥操作套装构建“人类示范-数据采集-数据自动标注-模型训练-真机验证”完整链路:
教师、学生在虚拟空间模拟作业动作(如叠衣服、装配零件),机器人同步记录“成功、失败、失误”全状态数据;
配套训练数据标注平台自动完成数据同步与智能标注,无需人工逐帧处理;
训练样本直接用于模型优化,成果可快速部署到机器人本体测试,让“强化学习、技能迁移”等科研课题从论文理论变为可复现的实验,加速教学成果向科研创新转化。
开放兼容的开发生态:兼顾教学入门与深度创新
提供通用仿真工具(如NVIDIA Isaac)与ROS2开源接口,支持Python/C++二次开发:
低年级学生通过图形化界面“拖模块”控制机器人,快速建立对“运动控制、交互逻辑”的认知;
高年级学生与科研团队可调用底层接口,自定义视觉识别算法、优化运动规划逻辑,甚至开发专属应用场景(如工业物料分选、家庭服务流程),实现从“用设备”到“创方案”的能力跃升。
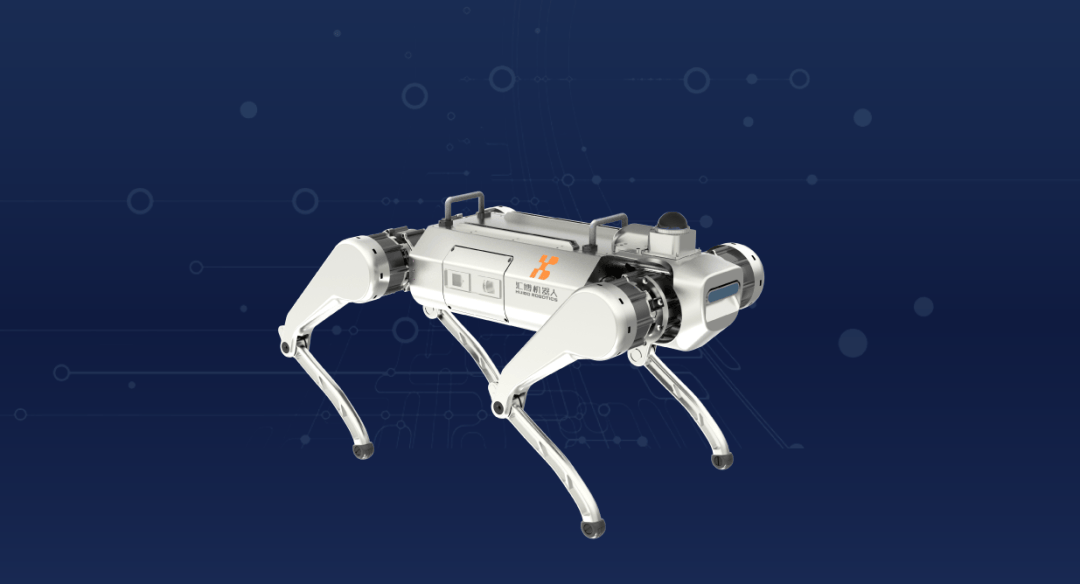
2、四足机器狗及技能学习开发平台
四足机器狗及技能学习开发平台由高扭矩电机、仿生腿部关节、激光雷达和深度视觉、强化学习算法等软硬件组成,可作为机器狗强化学习算法技能训练与验证的开放式通用技术平台。
模块化设计:从教具到多场景开发平台
关节电机、电池、传感器支持独立拆卸、更换,兼具教学与科研双重价值。
教学侧:作为“机器人拆装训练平台”,完成“电机认知-传感器原理-硬件组装”基础教学,让学生亲手拆解、重组,破解传统设备“黑箱化”痛点;
科研侧:支持改装为灾后救援、巡检等特种机器人原型机(如加装云台变巡检机、搭载救援设备变救灾平台),推动“特种场景运动控制、多传感器融合”等前沿研究落地。
全环境运动:突破场景限制的“越野级选手”
多传感器融合(内置IMU、深度相机,选配激光雷达),实现“状态感知-环境建模-目标识别”全流程自动化。支持楼梯、斜坡、狭窄通道等全地形自主运行,解决传统机器狗“只能平地跑”的局限。
高级功能:开箱即用的“科研加速器”
SLAM建图、动态避障、全身运动控制、跌倒恢复、远程更新等高级功能开箱即用。
科研开发链:从“硬件驱动”到“AI算法”全开放
开放“电机驱动-AI算法”完整开发链,全方位支撑前沿研究:
原生集成深度强化学习框架,支持“仿真训练-真机验证”闭环,学生可通过“试错-优化”让机器人自主学习步态、策略,加速算法创新;
选配捆绑高性能工作站/一体机,解决仿真训练算力瓶颈,提供“硬件+算法+算力”一体化方案。
二、汇博具身智能升级方案:存量设备换新
1、具身智能升级方案逻辑
存量资产焕活:复用已有平台,降本提效
基于院校已部署的工业机器人、产线单元、服务机器人系统进行升级,不推倒重来,最大化复用沉淀资产,大幅压缩改造预算,让老设备承载新教学功能,实现花小钱办大事。
功能模块迭代:替代传统设备,突破场景桎梏
用人形/四足机器人替换传统设备的功能短板。
替代AGV/AMR移动机器人:解决“仅能平地运行、交互能力弱”问题,以更灵活的运动和交互,支撑“人机协作”实训;
替代巡检服务机器人:突破“场景单一、自主决策差”瓶颈,凭借全地形运动能力,拓展“复杂环境巡检”教学。
教学边界拓展:三大能力,解锁新兴实训
依托人形/四足机器人的“拟人交互、全地形运动、多机协同”核心能力,构建三大前沿教学场景:
人机协作:通过语音、视觉交互训练,让学生掌握“人形机器人操控工业设备(开关机、换模块)”的协同逻辑;
智能巡检:利用全地形运动特性,开展“四足机器人攀爬楼梯、识别产线异常”的复杂场景巡检实训;
柔性产线:基于多机协同能力,验证“人形/四足+工业机器人+AGV/AMR”的全流程物料调度,模拟真实产业的柔性生产闭环。
2、具身智能机器人开发平台(Astra Pro)升级方案
单台设备升级(适配工业机器人编程平台)

升级任务:
人形机器人基础设置、智能交互(语音/视觉调测);
模仿工业机器人作业技能(如夹取、装配);
操控设备开关机、更换模块,验证 “人机协作逻辑”。
教学价值:
从“教机器人操作”升级为“教人机协同技能”,让学生理解“未来工厂的人机分工”。
实训(验)室/产线升级(适配多台工业机器人+智能仓储)


升级任务:
多机协同调度(人形+工业机器人+AGV配合,完成“物料转运-加工-质检”全流程);
柔性产线运维(自动开关设备、更换产线模块,模拟真实工厂场景)。
教学价值:
构建“产线级人机协作”实训体系,让学生掌握“复杂场景下的设备调度、任务分配”能力。
3、四足机器狗及技能学习开发平台升级方案
实训(验)室升级(适配服务机器人人工智能技术应用系统)
升级任务:
自主建图导航:以“仿生运动+多传感器融合”,替代原有服务机器人的平面导航模块;
智能巡检与识别:替换原有服务机器人的固定巡检云台,通过“可动态调整的感知系统”实现全维度巡检。
教学价值:
让学生掌握复杂环境导航、多模态感知融合技术,同时深度衔接全地形巡检、硬件模块化升级等产业真实场景。
产线升级(适配柔性产线,替代AGV/AMR)
升级任务:
自主建图导航:自主构建柔性产线地图,适应复杂地形(楼梯、窄道等);
智能巡检:搭载视觉云台,自动识别产线状态(如设备故障、物料异常);
物料转运:承载15kg物料,完成产线间物流配送,验证“全地形产线物流方案”。
教学价值:
用“四足机器人替代AGV”,打破传统产线物流限制,让学生掌握“非结构化场景下的物流调度”技能。
4、院校层级精准匹配升级方案
本科院校:聚焦“科研+产教融合”
>>科研课题组(机器人工程、人工智能专业):
支撑“复杂环境 SLAM 建图优化”“人机协作决策算法”“四足步态自适应控制”等前沿课题研究,满足论文发表、专利申报需求;
提供“仿真训练-真机验证”闭环,加速“多模态融合、强化学习落地”等科研成果转化,适配机器人学、人工智能等专业的科研KPI。
>>工训中心产线(智能制造、机器人工程专业):
模拟“未来智能工厂”场景,支撑“柔性生产调度”“人机协同作业流程优化”等产教融合课程;
学生通过“设计协作逻辑-编写调度代码-真机验证效果”,理解智能制造中“人-机-产线”的协同关系,培养系统思维。
职业院校:聚焦“技能+就业”
>>专业实训室(工业机器人、智能技术专业):
降低操作门槛,学生通过“拆解机器狗关节-调试SLAM 建图参数-编写避障逻辑”,掌握“传感器应用、路径规划、设备维护”等核心技能;
对接工业机器人运维、智能设备调试等岗位需求,提升就业竞争力。
>>产教融合基地(工业机器人、自动化专业):
模拟真实工厂场景,学生通过“规划机器狗转运路线-调试人形机器人抓取精度-优化多机协同效率”,掌握非结构化环境物流调度、产线应急响应等岗位技能;
与智能制造企业需求直接对接,实现“实训内容即岗位能力”,缩短就业适应期。
具身智能技术快速发展背景下,智能机器人将在社会中发挥更加重要的作用。汇博机器人集团持续深化具身智能技术应用,具身智能机器人开发平台(Astra Lite)、具身智能机器人数采平台(Astra Data)将陆续发布,培养面向智能时代的创新人才!
 苏公网安备32059002004848
苏公网安备32059002004848









